BlueROV2 Heavy Configuration
The smaller footprint and motor layout give the team confidence in movement-heavy tasks, especially roll attempts that the robot has achieved in past seasons.
Our Robot
Sir. Swims-A-Lot is a Blue Robotics BlueROV2 Heavy Configuration converted from an ROV into an autonomous underwater vehicle. For 2026, the team is combining BlueOS, a Raspberry Pi 4, Navigator board access, and new MAVLink work to make movement and navigation more repeatable.
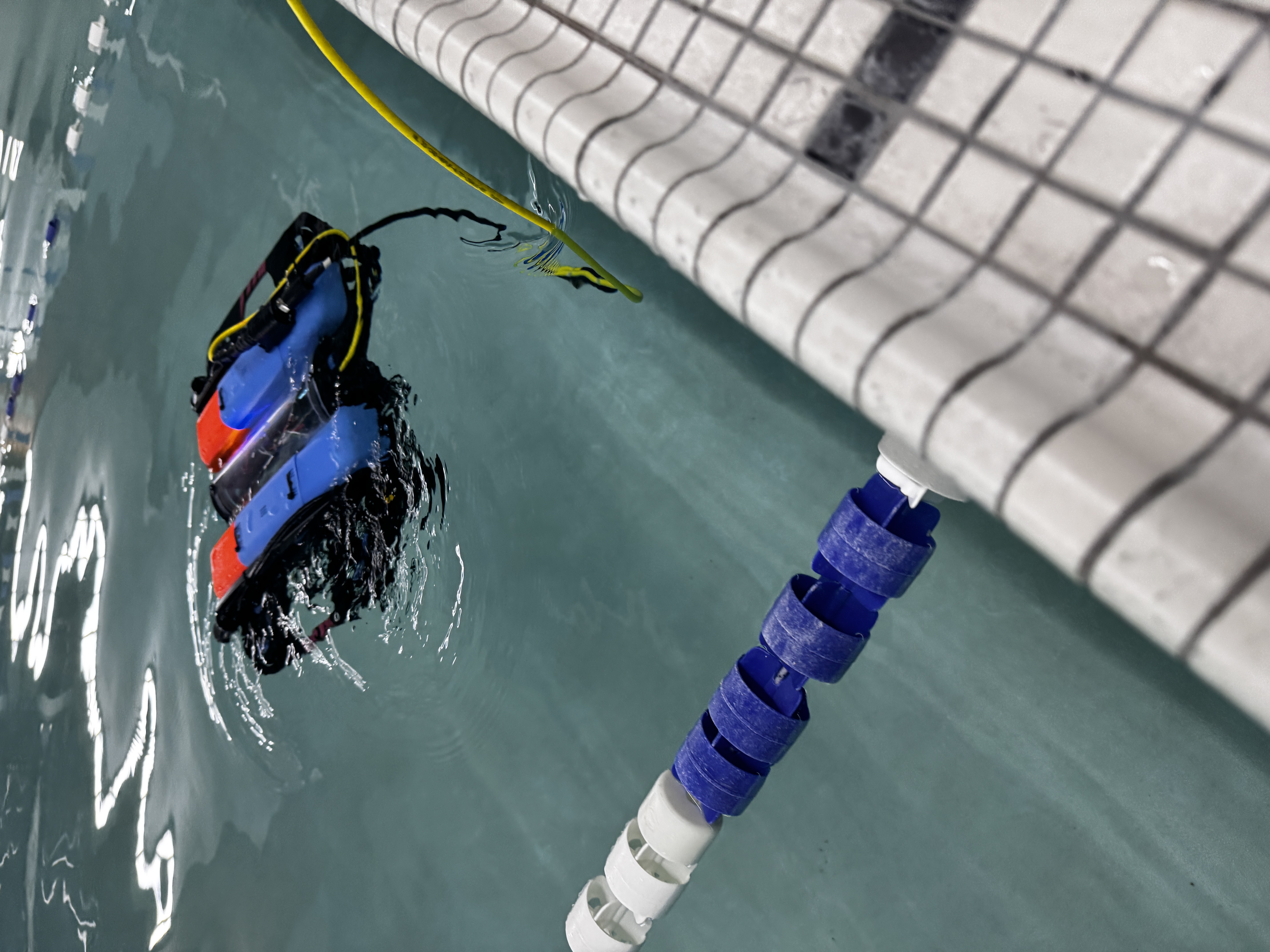
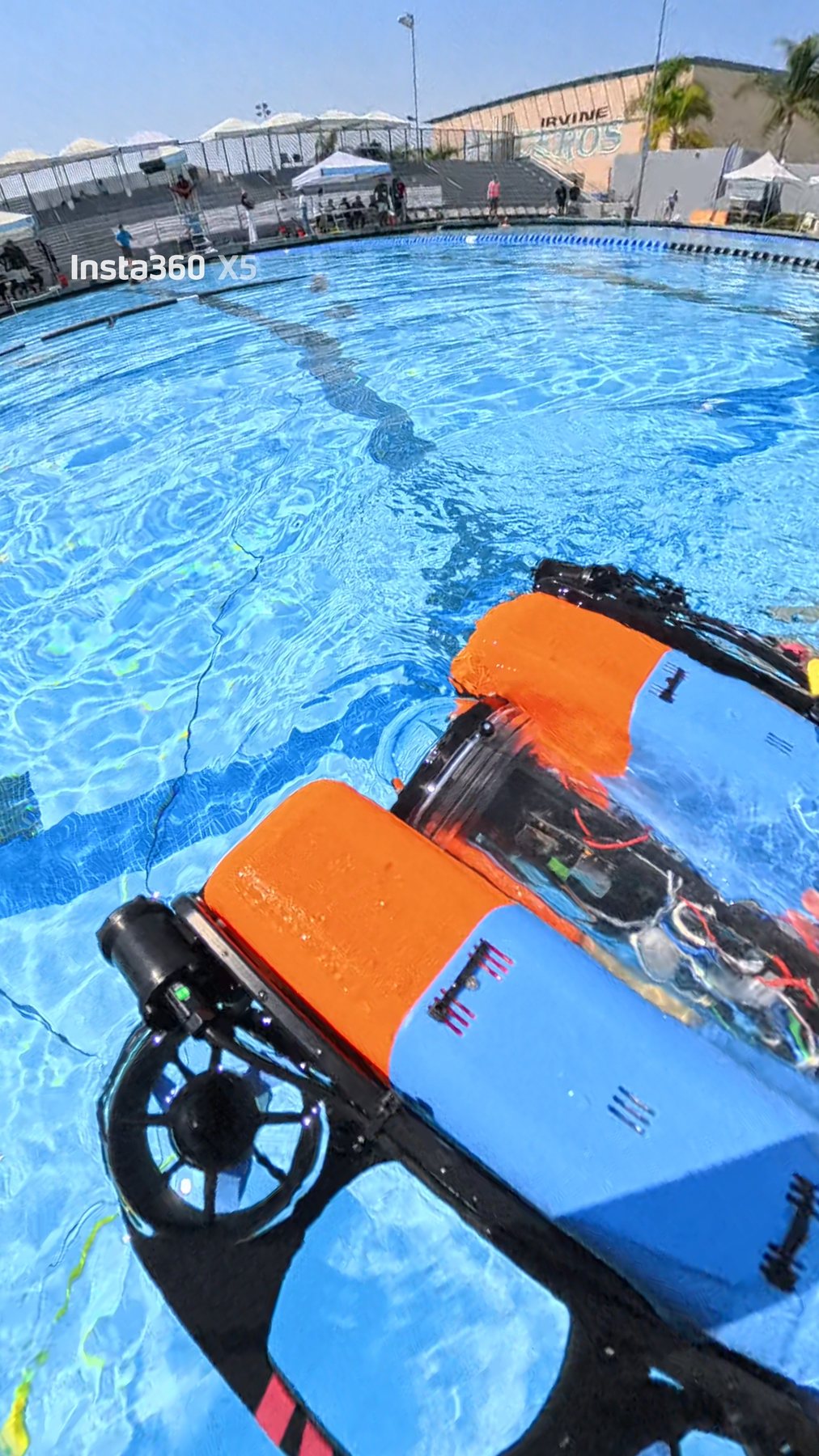
Pool Testing
These photos show the robot in actual pool conditions: surface checks, competition-pool testing, and underwater camera views used to understand how the vehicle behaves around turbulence and glare.

Vehicle Architecture
The smaller footprint and motor layout give the team confidence in movement-heavy tasks, especially roll attempts that the robot has achieved in past seasons.
The codebase has used the Blue Robotics Navigator Python library and is now integrating ArduSub MAVLink to broaden how the team can command and monitor the robot.
Compass data is central to the 2026 plan: maintaining heading, reducing drift, and supporting navigation tasks such as slalom and surfacing in the octagon.
Competition Strategy
A primary goal that should be achievable with the existing codebase. The team is not prioritizing the restore and recovery role options.
The BlueROV2 size and motor configuration make roll attempts a good scoring opportunity, so the team plans to attempt it every run.
Gate uses reliable open-loop movement. Slalom and octagon surfacing lean on color detection, compass headings, and stable movement.
A stretch goal attempted after higher-priority goals are working, aided by heading hold and improved stability.
Testing Strategy
Motor speeds and balance are being adjusted so stable hover becomes less dependent on manual inputs.
Reliable heading data is a major testing target because it supports navigation, stability, and octagon surfacing.
The team has used Fathom X tethering and Wi-Fi router connections while learning what works best for testing and debugging.
The team is prioritizing movement-based challenges, heading stability, and code practices that make Sir. Swims-A-Lot easier to operate, understand, and improve year after year.